자동차의 미래로 자리 잡은 자율주행자동차는 외부센서를 통해 상황을 인식, 전자제어장치(ECU)에서 도로 주행방법을 판단하고 기계장치들을 제어하며 움직인다. 운전자가 눈과 귀로 주위 환경을 파악하고 머릿속으로 주행전략을 결정, 팔과 다리를 움직여 차를 달리는 방식과 같다. 자율주행차에서 ECU나 팔다리 역할을 수행하는 각각의 제어장치들도 물론 중요하지만, 외부 주행상황을 정확하게 파악하기 위한 센서기술은 자율주행기술의 핵심으로 꼽힌다. 자동차업체들은 관련 기술을 선제적으로 확보하기 위해 치열한 경쟁을 펼치고 있다.
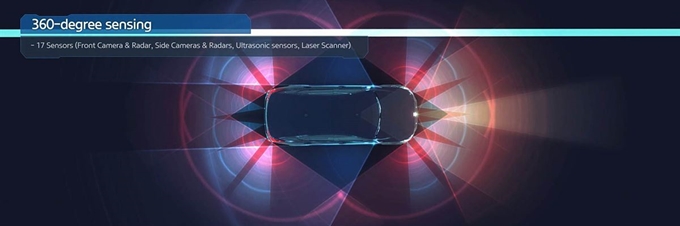
자율주행차의 외부환경 인지에 사용되는 센서는 대표적으로 카메라, 레이더(RADAR), 라이다((LiDAR)로 구성된다. 이들 센서는 각각의 장단점이 뚜렷하기 때문에 단독으로 활용되기보다는 복합적으로 적용, 상호보완 작용을 한다.
카메라는 인간의 눈과 같은 센서로 전방 사물 및 차선 인식, 신호등, 표지판, 보행자 등 주변 환경을 인식하는 역할을 담당한다. 카메라 센서 개수의 경우 레벨3 자율주행에서 4개 이상, 레벨4~5에선 8개 이상이 필요할 것으로 예상된다. 자율주행차 기술이 발달할수록 필요한 카메라 수도 늘어나는 만큼 2022년엔 자동차 센서 시장에서 가장 큰 비중을 차지할 것으로 전망된다. 다만 카메라는 악천후나 충분한 빛이 없으면 제 기능을 수행할 수 없다는 단점이 있다.
최근 카메라 센서는 단일 렌즈를 사용하는 ‘모노(Mono)’ 방식에서 두 개의 렌즈를 사용하는 ‘스테레오(Stereo)’ 방식으로 진화하고 있다. 스테레오 방식은 인간의 두 눈으로 바라보듯 두 개의 렌즈를 통해 물체를 3차원으로 인지하는 것이 가능하다. 2차원적인 단순한 형상 정보에 더해 원근감까지 측정할 수 있다. 다만 스테레오 카메라는 모노 방식보다 생산 단가가 높고, 처리해야 할 데이터양이 급격하게 증가한다는 문제가 있다. 업체들은 아직 모노 방식의 카메라를 유지하면서 그 성능을 고도화하는 방식으로 대응해나가고 있다.
레이더는 전자파를 발사해 돌아오는 전파의 소요 시간을 측정, 주변 사물과의 거리 및 속도를 탐지하는 센서이다. 카메라와 달리 날씨와 관계없이 제 성능을 발휘한다는 점에서 센서 중 신뢰도가 가장 높다. 레이더는 주파수 영역에 따라 단거리부터 장거리까지 모두 감지가 가능해 현재도 긴급자동제동장치, 스마트 크루즈 컨트롤 등 첨단운전자지원시스템(ADAS) 기술에 적용되고 있다. 다만 레이더는 물체의 형상을 확실하게 인식할 수 없다는 단점이 있다. 이에 업체들은 레이더 센서의 해상도를 높여 물체에 대한 식별 능력을 향상하는 한편 더 작고 저렴하게 만들기 위해 노력하고 있다.
라이다는 레이더와 달리 고출력의 레이저를 사용해 대상까지의 거리, 방향, 속도, 온도 등을 감지할 수 있는 기술이다. 다른 센서들에 비해 고해상도의 3차원 공간 정보를 획득할 수 있다. 다만 비싼 생산가격으로 상용화되기까진 조금 더 시간이 걸릴 것으로 보인다. 대량의 데이터 처리와 라이다 탐지를 방해하는 다양한 레이저 간섭 문제 역시 해결해야 할 과제다. 이에 현재 업체들은 라이다의 성능을 고도화하는 방식으로 개발을 진행하면서도 라이다를 아예 사용하지 않는 자율주행기술도 검토하고 있다.
외부 주행 환경을 직접 파악하는 카메라, 레이더, 라이다 센서가 향후 기술적으로 크게 발전한다고 해도 센서에 탐지되지 않는 앞의 앞 자동차가 갑자기 차선을 바꿨다든지, 커브길 바로 직후에 사고가 난 상황 등까진 파악하기가 힘들다. 이 때문에 센서 기술과 함께 자율주행차들이 다른 차들과 운전자, 도로 인프라와 실시간 통신을 통해 정보를 주고받을 수 있는 ‘V2X(Vehicle to X)’ 기술이 함께 발전해야 한다.
김현우기자 777hyunwoo@hankookilbo.com
기사 URL이 복사되었습니다.

댓글0