0.022㎝ 아주 작은 로봇이
수많은 작은 털로 노 젓듯 이동
혈관 속에서 약물ㆍ세포 나르는
차세대 의료용 기기로 활용 기대
몸에 난 작은 털들(섬모)을 이용해 움직이는 짚신벌레를 빼 닮은 미세 로봇을 국내 연구진이 세계 처음으로 구현했다.
대구경북과학기술원(DGIST)은 2일 “로봇공학전공 최홍수 교수 연구진이 짚신벌레의 섬모 운동을 모방한 마이크로로봇을 개발해 국제학술지 ‘사이언티픽 리포트’ 지난달 29일자 온라인판에 발표했다”고 밝혔다. 최 교수는 “혈관 속을 헤엄치며 약물이나 세포를 실어 나르는 의료용 로봇으로 발전시키겠다”며 “향후 임상시험을 통해 차세대 진단ㆍ치료 기술로 활용되길 기대한다”고 말했다.
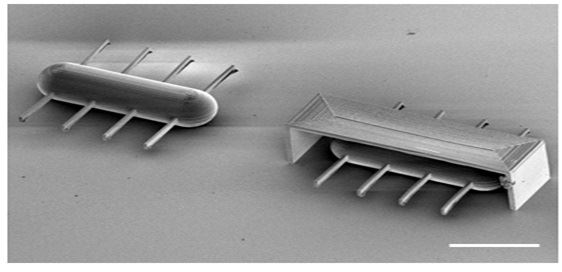

연구진이 만든 로봇은 길이 220마이크로미터(0.022㎝ㆍ1㎛=0.0001㎝), 높이 60㎛(0.006㎝)로, 맨눈으로 보면 아주 작은 알갱이 같다. 움직이는 속도는 초당 340㎛(0.034㎝). 1초에 몸 길이의 1.5배만큼 이동하는 셈이다. 이렇게 섬모만으로 움직이는 마이크로미터 크기의 로봇은 로봇 선진국인 미국이나 유럽에서도 구현된 적이 없다.
로봇은 크기가 작을수록 자연스럽게 움직이기 어렵다. 큰 로봇을 움직일 땐 중력만 극복하면 되지만, 작은 로봇은 전자기력이나 부력, 표면장력 등 다양한 힘을 고려해야 하기 때문이다. 예를 들어 같은 물 속이라도 작은 로봇에겐 큰 로봇보다 점성이 더 크게 작용한다. 사람은 아무렇지 않게 헤엄칠 수 있는 수영장 물이 미생물에겐 끈끈한 꿀 같은 것과 동일한 이치다.
과학자들은 그래서 미생물이 움직이는 원리를 미세 로봇에 적용하려고 시도해왔다. 유체 속 미생물의 유영법은 크게 3가지다. 코르크 마개를 따기 위해 스크류를 꽂아 넣을 때처럼 나사 모양으로 회전하면서 앞으로 나가거나(나사선 추진운동), 파동이 진행하듯 긴 꼬리(편모)를 출렁이면서 전진하거나(진행파동운동), 수많은 짧은 털로 노를 젓듯 이동하는(섬모 왕복운동) 방법이다. 나사선 추진운동과 진행파동운동 로봇은 스위스 네덜란드 미국 연구진이 이미 구현했지만, 섬모 왕복운동을 하는 로봇은 나온 적이 없다.

실제 짚신벌레 동영상을 수시로 보며 움직임을 관찰한 연구진은 짚신벌레가 섬모를 뒤로 세게 밀어냈다 앞으로 살살 끌어오는 식으로 힘을 조절하며 그 차이를 이용해 전진한다는 사실을 파악했다. 연구진은 반도체 공정에서 쓰이는 화학물질에 레이저를 쏘여 짚신벌레를 닮게 설계한 입체 로봇을 제작한 다음 섬모에만 금속을 씌워 자성을 띠게 했다. 그리고 외부 자기장을 걸어 섬모의 움직임과 힘을 조절하는 방식으로 로봇을 움직였다. 논문의 제1저자인 박사과정 학생 김상원씨는 “몸체와 섬모가 따로 움직이는 초정밀 3차원 미세 구조체와 비대칭적 움직임을 반복하는 섬모를 동시에 구현한 건 처음”이라고 설명했다.
연구진에 따르면 대형 로봇은 기본적인 동작들의 원리가 이미 대부분 정립돼 있다. 그만큼 진입 장벽도 높다. 반면 미세 로봇 연구는 아직 초기 단계다. 김씨는 “일상생활에선 무심코 지나치거나 무시했던 다양한 물리적 원리가 크게 작용하며 생각지 못한 양상을 만들어낼 수 있다는 점이 미세 로봇 세계의 가장 큰 매력”이라고 말했다.
임소형 기자 precare@hankookilbo.com
기사 URL이 복사되었습니다.

댓글0